高速自動(dòng)駕駛主要的應(yīng)用場(chǎng)景乘用車真正落地很難,目前像Waymo這樣的大企業(yè)還處于測(cè)試階段。在技術(shù)方面,通用場(chǎng)景的高速自動(dòng)駕駛技術(shù)成熟至少要10~15年的時(shí)間,這其中包含自動(dòng)駕駛基礎(chǔ)設(shè)施的完善時(shí)間、公共道路法律法規(guī)的成熟時(shí)間、產(chǎn)業(yè)鏈技術(shù)提升及成本下降的時(shí)間,還包括社會(huì)公眾對(duì)自動(dòng)駕駛技術(shù)的接受度等等。
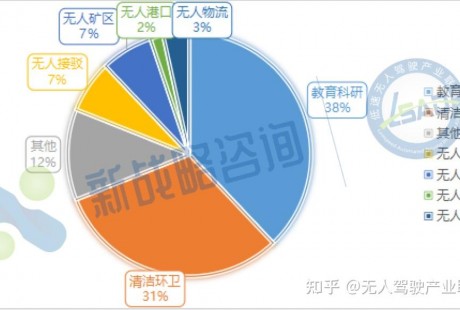
因此很多自動(dòng)駕駛企業(yè)選擇從低速落地,但低速自動(dòng)駕駛是否技術(shù)更簡(jiǎn)單,實(shí)現(xiàn)起來更容易呢?據(jù)了解,酷哇機(jī)器人是業(yè)內(nèi)率先低速自動(dòng)駕駛快速落地的公司,并發(fā)布了全球第一款自動(dòng)車,已在長(zhǎng)沙橘子洲落地運(yùn)營(yíng)有一年多的時(shí)間。今年以來,酷哇機(jī)器人在全國(guó)多地規(guī)模化運(yùn)營(yíng),自動(dòng)駕駛的技術(shù)實(shí)力從研發(fā)到運(yùn)營(yíng)得到了雙重驗(yàn)證處于領(lǐng)跑的位置。
近期,我們?cè)陂L(zhǎng)沙天心區(qū)完整體驗(yàn)了一回真正的自動(dòng)駕駛掃地車。只要是車輛上路,不管高速還是低速,遇到的道路復(fù)雜性是同樣的。
城市道路場(chǎng)景會(huì)出現(xiàn)“突發(fā)別車”問題。針對(duì)此問題需要對(duì)路面可視區(qū)域內(nèi)的私家車進(jìn)行識(shí)別和跟蹤,進(jìn)而軌跡預(yù)測(cè)和安全策略防范。但是,大部分自動(dòng)駕駛傳感感知系統(tǒng)對(duì)近身私家車的感知識(shí)別是比較困難的,酷哇機(jī)器人的整車感知系統(tǒng)對(duì)近距物體的識(shí)別和軌跡預(yù)測(cè)進(jìn)行了針對(duì)性設(shè)計(jì),可以保證貼身私家車的識(shí)別和跟蹤可靠性。
十字路口路況復(fù)雜的問題。自動(dòng)駕駛掃地車在通過十字路口時(shí),酷哇機(jī)器人的感知系統(tǒng)要在識(shí)別紅綠燈的同時(shí),對(duì)斑馬線行人和過往車輛都正確的軌跡預(yù)測(cè)并進(jìn)行精確的車輛控制。
路邊行人軌跡多變的問題。當(dāng)路邊出現(xiàn)行人的時(shí)候,行人的軌跡預(yù)測(cè)是十分困難的,因?yàn)槿藥缀蹩梢詫?shí)現(xiàn)全向靈活移動(dòng)。自動(dòng)駕駛掃地車靠近行人的安全策略尤為重要,需要根據(jù)行人的當(dāng)前速度和移動(dòng)特性設(shè)定足夠充分的安全邊界。酷哇自動(dòng)駕駛掃地車在行人不同方位進(jìn)行運(yùn)動(dòng)控制,采用了不同運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)規(guī)劃器。
體積小速度快的摩托車加塞問題。摩托車的運(yùn)動(dòng)屬性捕獲也是一個(gè)很具挑戰(zhàn)的課題,在靜止?fàn)顟B(tài)和運(yùn)動(dòng)狀態(tài)都需要根據(jù)車輛的三維位姿識(shí)別,預(yù)測(cè)其連續(xù)運(yùn)動(dòng)特性,從而系統(tǒng)決定自動(dòng)駕駛掃地車需要采取的避讓策略。
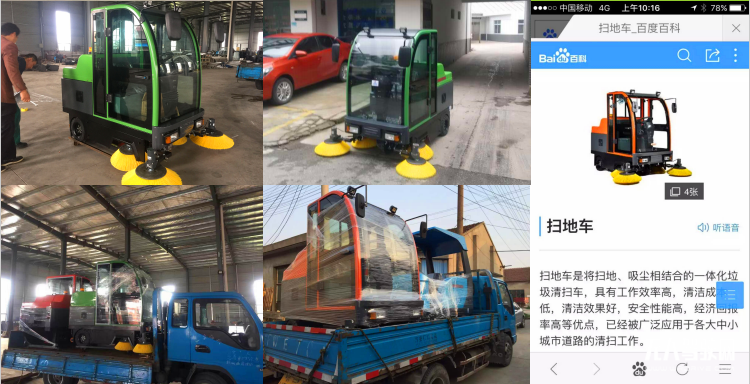
作為自動(dòng)駕駛掃地車,除了應(yīng)對(duì)道路情況及時(shí)調(diào)整,還有清掃作業(yè)的關(guān)鍵性能。實(shí)實(shí)在在地把馬路掃干凈涉及自動(dòng)駕駛性能的復(fù)雜性也不少。
比如沿邊清掃,要做到沿著馬路牙子的縫隙一絲不茍地作業(yè),這對(duì)車輛定位的精準(zhǔn)度要求非常高,酷哇機(jī)器人的定位精準(zhǔn)度可達(dá)5cm。考慮到城市道路的復(fù)雜性,即連續(xù)彎道,破損的路邊,非清晰的道路線等,做到能穩(wěn)定實(shí)現(xiàn)車輛精準(zhǔn)沿邊非常考驗(yàn)系統(tǒng)的智能型和魯棒性。
垃圾追蹤清掃,這是對(duì)自動(dòng)駕駛掃地車的一個(gè)標(biāo)準(zhǔn)需求。每天的兩次精細(xì)化普掃后,剩余時(shí)間段是巡回清掃。發(fā)現(xiàn)垃圾及時(shí)清理,酷哇機(jī)器人垃圾追蹤的性能極大提高了巡回作業(yè)的清掃效率。
車輛整體調(diào)度,環(huán)衛(wèi)保潔需要系統(tǒng)管理模式。自動(dòng)駕駛掃地車在區(qū)域內(nèi)的整體調(diào)度顯得尤為重要,酷哇自動(dòng)駕駛掃地車可以實(shí)現(xiàn)位置信息、作業(yè)狀態(tài)、作業(yè)進(jìn)度、作業(yè)路線等智能化管理。
自動(dòng)駕駛的低速落地,速度降低并不意味著技術(shù)變簡(jiǎn)單,需要考慮多方面的問題。首先,低速自動(dòng)駕駛上路需要達(dá)到和高速自動(dòng)駕駛同樣的性能,比如路徑規(guī)劃最優(yōu)、不能撞到物體等。其次,低速自動(dòng)駕駛一般使用在特殊用途的領(lǐng)域,像清掃車、灑水車等環(huán)衛(wèi)車。不同車的功能不同,意味著要針對(duì)環(huán)衛(wèi)行業(yè)進(jìn)行特殊的研發(fā),類似垃圾的識(shí)別就需要大量的數(shù)據(jù)迭代才能完成。酷哇機(jī)器人在環(huán)衛(wèi)行業(yè)深耕積累了大量的運(yùn)營(yíng)數(shù)據(jù)優(yōu)勢(shì),并不斷在數(shù)據(jù)優(yōu)勢(shì)基礎(chǔ)上升級(jí),技術(shù)實(shí)力業(yè)內(nèi)領(lǐng)航。最后,縮短自動(dòng)駕駛產(chǎn)業(yè)技術(shù)和應(yīng)用之間的距離任重道遠(yuǎn),低速自動(dòng)車會(huì)改變整個(gè)環(huán)衛(wèi)行業(yè)的產(chǎn)業(yè)結(jié)構(gòu),提升行業(yè)的作業(yè)效率。