近日,有外媒報道斯坦福大學研究人員展示了一款全新的攝像頭系統(tǒng),該系統(tǒng)基于團隊自主研發(fā)的拐角攝像頭打造,可捕獲各類物體表面反射的光線,擁有更寬、更遠的視野以及更快的成像速度,足以監(jiān)控視線外的動作。研究人員期望在未來的某一天,這類超人視覺系統(tǒng)(superhuman vision systems)或?qū)椭?a href="http://www.jiexh.com" target="_blank">自動駕駛汽車及機器人提升其運行安全度,而非依賴于人類的指令引導(dǎo)。
斯坦福大學電氣工程助理教授戈登韋茨坦說,“人們都在談?wù)摯蛟煲豢顢z像頭,希望這類設(shè)備能夠具備像人類一樣的視覺能力,然后將該類攝像頭應(yīng)用到自動駕駛汽車和機器人中。然而,我們想要打造的攝像頭系統(tǒng),從功能性上講,要遠超前者。我們想要攝像頭呈現(xiàn)3D視覺影像,且能兼顧環(huán)境場景的各個角落,采用可見光光譜(visible light spectrum)成像。”
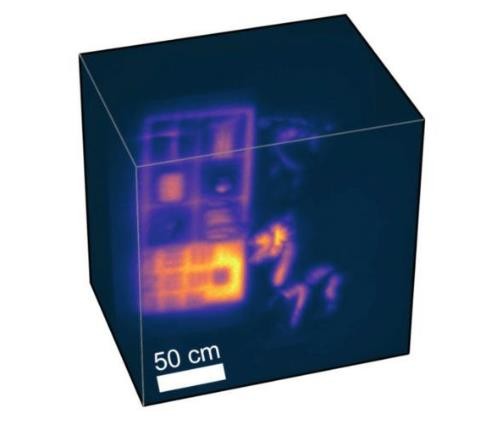
該系統(tǒng)的掃描速率為4幀/秒,能夠以60幀/秒的速度重構(gòu)場景,但需要用到計算機和一款圖像處理軟件,后者可增強圖像處理能力。能看到從角落等視野盲區(qū)處反射回來的不可見光的實時運動,這對于汽車來說是無疑是一個好消息,不過針對自動駕駛汽車或機器人的應(yīng)用系統(tǒng)還需要進一步的改進。