L4級(jí)為什么需要路側(cè)配合?
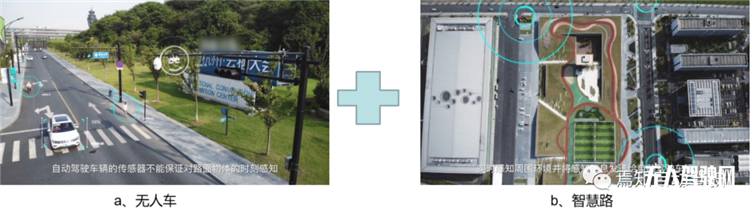
在實(shí)現(xiàn)自動(dòng)駕駛的過(guò)程中,對(duì)于車端感知的自動(dòng)駕駛其由于感知范圍有限,感知性能上由于傳感器自身存在的限制,可能導(dǎo)致感知性能暫時(shí)性降低甚至失效,僅靠單車的智能,很多典型的駕駛場(chǎng)景是無(wú)法滿足安全駕駛需求的,這也是當(dāng)前主機(jī)廠開(kāi)發(fā)自動(dòng)駕駛系統(tǒng)的痛點(diǎn)。
這就使得路端信息的加入是一個(gè)必需的過(guò)程。通過(guò)對(duì)部分主機(jī)廠已經(jīng)量產(chǎn)的自動(dòng)駕駛產(chǎn)品統(tǒng)計(jì)分析看出,L4在其限定的運(yùn)行范圍ODD內(nèi)需要運(yùn)行穩(wěn)定安全,更多是需要路端軟件配合車端軟件進(jìn)行優(yōu)化。主機(jī)廠希望通過(guò)構(gòu)建智慧的路以彌補(bǔ)車端感知缺陷,從而達(dá)到提高自動(dòng)駕駛性能,降低成本的目的。
L4級(jí)路側(cè)如何配合車側(cè)?
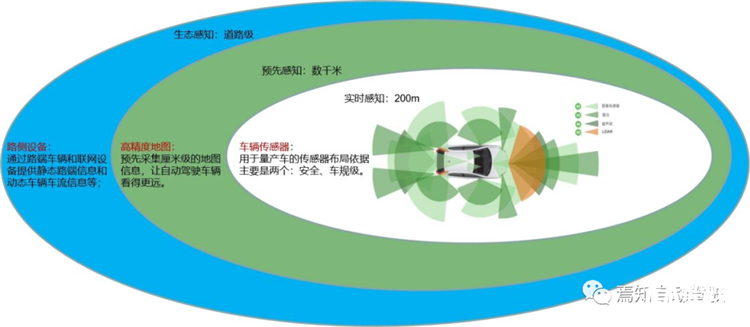
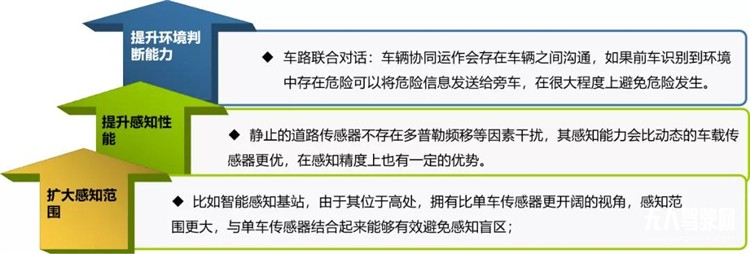
L4級(jí)自動(dòng)駕駛路側(cè)應(yīng)用原理是利用智慧道路上的傳感器感知、邊緣云計(jì)算、V2X/5G通訊等車路協(xié)同能力,參與自動(dòng)駕駛車輛的行駛控制。車路協(xié)同主要涉及車端、路側(cè)端和云端三個(gè)端口,通過(guò)統(tǒng)籌車、路、人以及實(shí)時(shí)交通的動(dòng)態(tài)信息,從而實(shí)現(xiàn)信息的互聯(lián)互通。
自動(dòng)駕駛汽車涉及人和車、車和車、車和路之間的默契配合。考慮道路智能化,把智能設(shè)備安置在道路上,通過(guò)通信網(wǎng)絡(luò),感知到的數(shù)據(jù)可以共享給周邊更多車輛,這樣將使自動(dòng)駕駛更好的運(yùn)作在定義的設(shè)計(jì)環(huán)境中,減少碰撞等危險(xiǎn)因素。
L4路側(cè)當(dāng)前主要有哪些技術(shù)痛點(diǎn)?
對(duì)于高度自動(dòng)駕駛來(lái)說(shuō),要求系統(tǒng)所能具備的控制能力實(shí)現(xiàn)指數(shù)級(jí)增長(zhǎng),且在很多不同的環(huán)境中均能夠接替人進(jìn)行有效的處理和控制。這就需要路側(cè)端有效的配合車側(cè)進(jìn)行環(huán)境信息的有效檢測(cè)。然而,需求路側(cè)端的輸入情況并不像想象中那么容易,它受制于如下四個(gè)方面的制約。

L4路側(cè)技術(shù)需求路線
對(duì)于L4級(jí)自動(dòng)駕駛來(lái)說(shuō)要想實(shí)現(xiàn)進(jìn)一步的自動(dòng)駕駛控制任務(wù),需要從如下幾個(gè)方面進(jìn)行努力:
①加快 5G 網(wǎng)絡(luò)布局,構(gòu)建路側(cè)設(shè)備全息感知高速環(huán)境;
②與車內(nèi)通信設(shè)備和云控中心形成 V2X 系統(tǒng),助力推進(jìn)基于車路協(xié)同的智能網(wǎng)聯(lián)汽車試驗(yàn)與應(yīng)用示范;
③需求政府牽頭主機(jī)廠打造寬松適宜的自動(dòng)駕駛政策環(huán)境,并對(duì)路側(cè)建設(shè)適當(dāng)給予一定的政策扶持,加快測(cè)試基地建設(shè)和推行測(cè)試準(zhǔn)入互認(rèn)。

L4級(jí)路側(cè)如何保證安全?
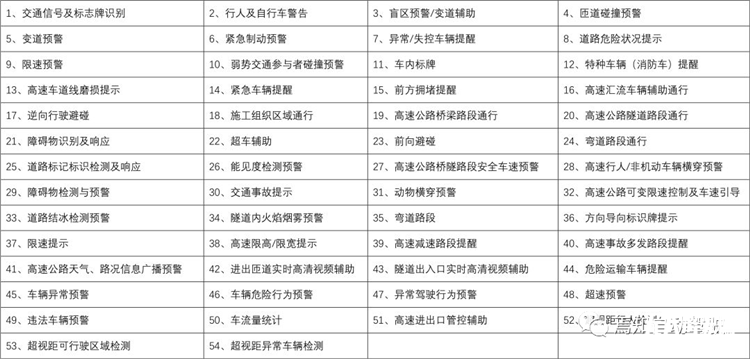
鑒于感知盲區(qū)、肉眼視距限制等原因,高速干道的匯入?yún)R出、隧道進(jìn)出口無(wú)論對(duì)于普通車輛還是自動(dòng)駕駛車輛來(lái)說(shuō),都是交通事故高發(fā)地段,同時(shí)該區(qū)域的交通狀況直接影響著高速通車效率。L4級(jí)路側(cè)系統(tǒng)對(duì)以上關(guān)鍵節(jié)點(diǎn)進(jìn)行實(shí)時(shí)態(tài)勢(shì)感知、擁堵預(yù)測(cè)、應(yīng)急事件檢測(cè),能夠有效解決自動(dòng)駕駛測(cè)試道路安全及交通效率問(wèn)題,同時(shí)也提升了交通監(jiān)測(cè)與管理能力。路側(cè)端通過(guò)在不同類型的路段布置相應(yīng)場(chǎng)景,不但能夠保證車輛安全通行的需求,同時(shí)還能夠滿足智能網(wǎng)聯(lián)車輛的測(cè)試需求。
整個(gè)智慧路端部署場(chǎng)景如下表所示:
為了更好地說(shuō)明路側(cè)單元如何能夠保證自動(dòng)駕駛的安全性,我們列舉當(dāng)前L3級(jí)自動(dòng)駕駛存在的一系列問(wèn)題及如何有效的利用路端感知能力解決該類問(wèn)題的方案策略。
實(shí)例1:隧道入口路端安全策略
原理說(shuō)明:車輛駛進(jìn)隧道前,因視野中隧道洞口亮度低造成“黑洞效應(yīng)”,隧道口內(nèi)形成盲區(qū)。路端感知系統(tǒng)是通過(guò)在隧道入口處安裝感知設(shè)備,感知隧道口附近障礙物、異常車輛等,提高行車的安全性,提前將異常信息通過(guò) V2X 發(fā)送給接近車輛,從而達(dá)到超視距感知的能力。
路端安全策略:鑒于隧道入口的特點(diǎn),此處的路端感知系統(tǒng)能力建設(shè)可通過(guò)在隧洞前一定距離(通常為 5-10m)處以壁掛方式設(shè)置感知終端。觀測(cè)主體為隧道內(nèi)部一定距離(通常為超視距盲區(qū)的 100m)的實(shí)時(shí)路況,用以消除黑洞效應(yīng)對(duì)駕駛員或自動(dòng)駕駛車輛攝像頭所造成的不利影響。同時(shí),設(shè)置一個(gè)攝像頭對(duì)隧道外部 100m 內(nèi)的異常駕駛車輛或異常闖入的施工人員進(jìn)行實(shí)時(shí)捕獲,用以保障駕駛安全
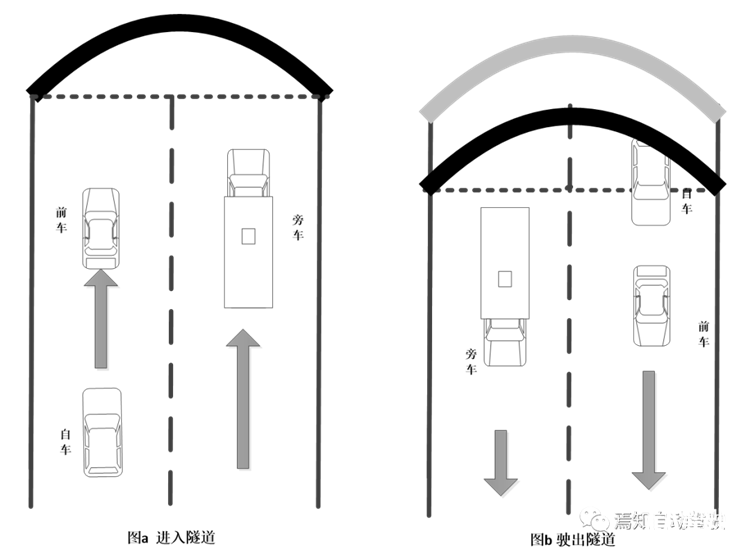
實(shí)例2:隧道出口路端安全策略
原理說(shuō)明:當(dāng)車輛駛出隧道時(shí),由暗處到達(dá)亮處形成白洞效應(yīng),隧道外對(duì)駕駛員形成盲區(qū)。通過(guò)在隧道出口處安裝路端感知設(shè)置,感知隧道出口外的環(huán)境,將異常情況通過(guò) V2X 發(fā)送給接近隧道出口的其他車輛,提高行車安全。
路端安全策略:與隧道入口類似,將在隧洞外側(cè)一定距離處設(shè)置寬視角攝像頭感知設(shè)備,觀測(cè)隧道外部該距離的所有范圍內(nèi)較近距離的實(shí)時(shí)路況,同時(shí)也設(shè)置了另一個(gè)窄視角攝像頭對(duì)隧道外部較遠(yuǎn)距離內(nèi)的特殊工況(如錐桶、三角警示牌等)進(jìn)行檢測(cè),用以增大傳感器的感知能力。
實(shí)例3:交叉匯入路端安全策略
原理說(shuō)明:高速公路匝道或交叉路口匯入口車流量大,行車視距小,車輛從匝道或交叉路口匯入時(shí),往往因?yàn)榇嬖谳^大的單車感知盲區(qū),而無(wú)法提前感知易導(dǎo)致變道發(fā)生碰撞。路側(cè)單元可以通過(guò)在高速匯入?yún)^(qū)域部署高速匯流車輛的全面檢測(cè)設(shè)備,提前發(fā)送相關(guān)車輛信息,實(shí)現(xiàn)通行輔助等功能。這一過(guò)程可減少車輛碰撞事故,有效地保證在高速匯入處的行車安全。
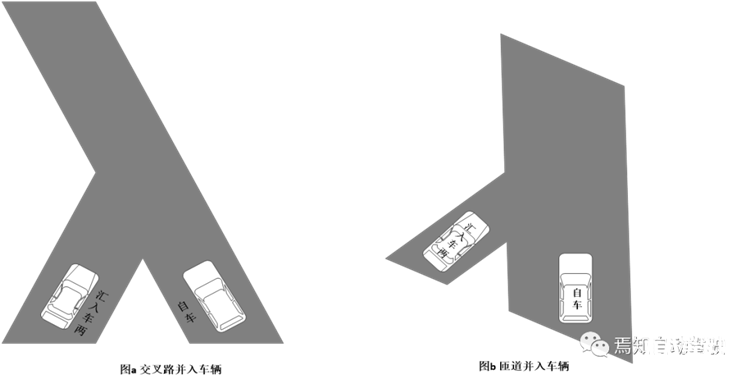
路端安全策略:在每個(gè)匯入?yún)^(qū)域部署兩個(gè)節(jié)點(diǎn)感知到可能對(duì)其在主道行駛時(shí)產(chǎn)生威脅的車輛位置、方向和速度信息。每個(gè)節(jié)點(diǎn)部署一套路側(cè)感知系統(tǒng),其關(guān)鍵觀測(cè)區(qū)域?yàn)檐囕v合流關(guān)鍵區(qū)域,在每個(gè)感知設(shè)備的邊緣系統(tǒng)中,將對(duì)路測(cè)單元自帶的攝像頭和毫米波雷達(dá)進(jìn)行高精度的數(shù)據(jù)融合,同時(shí)針對(duì)于網(wǎng)聯(lián)車自帶 GPS 定位的情況,也做了特殊處理,使得路側(cè)融合體系更為完善,并通過(guò)各個(gè)發(fā)送接收單元將感知信息實(shí)時(shí)進(jìn)行發(fā)布。
實(shí)例4:匝道匯出
原理說(shuō)明:高速公路匝道出口存在大量車輛連續(xù)變道等危險(xiǎn)駕駛行為,車輛在匝道口導(dǎo)流線區(qū)域突然減速、停車等情況,這將導(dǎo)致交通擁堵,該區(qū)域?qū)τ?a href="http://www.jiexh.com/">自動(dòng)駕駛存在巨大的安全隱患。
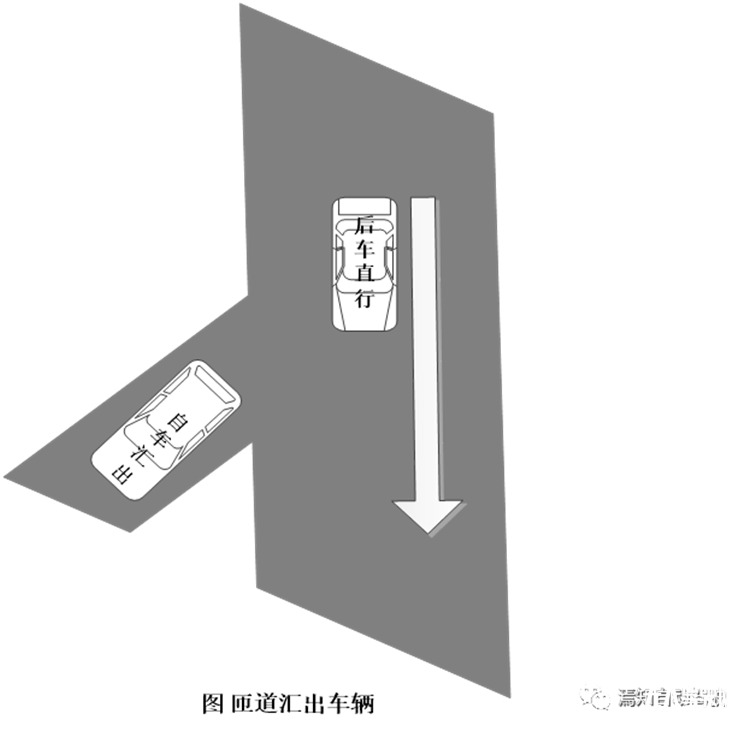
路端安全策略:安裝路側(cè)單元可通過(guò)在匝道匯出口部署路側(cè)全息感知系統(tǒng),能實(shí)時(shí)檢測(cè)車輛的速度、位置等信息。同時(shí),導(dǎo)流線區(qū)域異常停車、緊急變道等事件,提前將異常情況或超視距信息通過(guò) V2X 發(fā)送給接近車輛。匯出節(jié)點(diǎn)主要監(jiān)測(cè)區(qū)域?yàn)閰R出點(diǎn)前一定距離(一般為 100m 左右)及匯出點(diǎn)后一定距離(一般為 50m),道路前側(cè)路側(cè)設(shè)備需要安裝在匯出點(diǎn)視野最為開(kāi)闊處,通過(guò)安裝單純的攝像頭,也可補(bǔ)充安裝毫米波雷達(dá)等設(shè)備,并將兩者數(shù)據(jù)進(jìn)行融合,能夠?qū)η笆鲂袨檫M(jìn)行實(shí)時(shí)捕獲,一方面通過(guò) I2V 實(shí)現(xiàn)對(duì)后側(cè)車輛的提醒,同時(shí)也可以通過(guò) I2N 對(duì)車輛違法行為進(jìn)行及時(shí)上報(bào)和抓拍等處理。
L4級(jí)路端軟件架構(gòu)
L4級(jí)自動(dòng)駕駛系統(tǒng)的開(kāi)發(fā)的軟件架構(gòu)中不僅包含常規(guī)的車端軟件,也包含后續(xù)新一代的路端軟件。路端軟件實(shí)際是指包含路端感知體系、云端信息調(diào)度以及邊緣計(jì)算平臺(tái)三個(gè)大模塊。

①路端感知體系
對(duì)于路端感知體系來(lái)說(shuō),在L4級(jí)路側(cè)提出“超視距”感知的理念,設(shè)計(jì)開(kāi)發(fā)了主動(dòng)超視距視頻傳輸、超視距可行使區(qū)域檢測(cè)和超視距障礙物感知三個(gè)重要感知模塊。
②云端信息調(diào)度
L4級(jí)路側(cè)感知系統(tǒng)需要打造了一個(gè)擁有云計(jì)算能力的遠(yuǎn)程調(diào)度和監(jiān)控中心,用于實(shí)現(xiàn)云端自動(dòng)駕駛控制和交通調(diào)度。
③邊緣計(jì)算平臺(tái)
利用虛擬化技術(shù)及網(wǎng)絡(luò)技術(shù)整合大規(guī)模可擴(kuò)展的計(jì)算、存儲(chǔ)、數(shù)據(jù)、應(yīng)用等分布式計(jì)算資源完成 AI 模型算法的學(xué)習(xí)訓(xùn)練,能實(shí)現(xiàn)在云端訓(xùn)練 AI 模型,通過(guò)車云協(xié)同技術(shù)將其部署到嵌入式平臺(tái),使 AI 算法在車端自動(dòng)駕駛系統(tǒng)上得到深度應(yīng)用。
總結(jié)
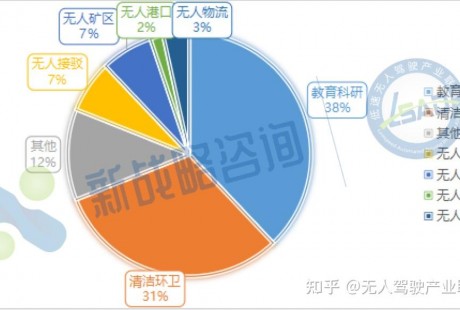
自動(dòng)駕駛技術(shù)的發(fā)展已經(jīng)到了必須改造基礎(chǔ)設(shè)施的階段,要全面構(gòu)筑“人-車-路”全域數(shù)據(jù)感知的智能路網(wǎng),進(jìn)入“聰明的車”與“智能的路”相互協(xié)同的新階段。也就是說(shuō),從自主駕駛轉(zhuǎn)向車路協(xié)同。可以先對(duì)簡(jiǎn)單相對(duì)固定的場(chǎng)景進(jìn)行路端改造。
比如乘用車行駛路線因個(gè)人和時(shí)間的不同而不同,短期內(nèi)難以大面積鋪開(kāi)。但對(duì)固定物流路線改造則相對(duì)容易,由于使用率高,邊際成本將大大降低。對(duì)于廣泛應(yīng)用的小汽車,自主駕駛的技術(shù)路線更為可能和現(xiàn)實(shí)。當(dāng)然,對(duì)于城市公交和礦區(qū)、碼頭的搬運(yùn)車輛等,由于固定線路和特定區(qū)域,可充分利用車路協(xié)同技術(shù)的優(yōu)勢(shì)。