經(jīng)過(guò)一個(gè)多世紀(jì)的發(fā)展,汽車以其特有的優(yōu)越性飛速發(fā)展,汽車保有量直線上升。但是,人們?cè)谙硎芷噹?lái)便捷的同時(shí),也面臨著嚴(yán)峻的交通問(wèn)題。因此,智能車輛的研究如雨后春筍般在世界各國(guó)開(kāi)展起來(lái)。
基于機(jī)器視覺(jué)的車道線檢測(cè)識(shí)別是智能車輛輔助駕駛系統(tǒng)的關(guān)鍵技術(shù)之一。車道線檢測(cè)就是從攝像頭獲得的圖像中,將車道線與背景進(jìn)行分離,從而獲得車道線的走向等信息[1]。目前國(guó)內(nèi)外已經(jīng)提出了許多車道線的檢測(cè)識(shí)別方法,早期的一些簡(jiǎn)單算法主要利用車道線固定且顏色明顯(如黃色和白色)對(duì)車道線進(jìn)行識(shí)別,往往有很大的局限性;后來(lái)的復(fù)雜算法抗干擾能力強(qiáng),但是處理速度及實(shí)時(shí)性較差。因此,如何準(zhǔn)確、快速地檢測(cè)識(shí)別出車道線已成為智能車輛輔助駕駛系統(tǒng)的一個(gè)重要問(wèn)題。針對(duì)道路特點(diǎn)以及對(duì)車道線識(shí)別的準(zhǔn)確性和魯棒性等要求,本文主要對(duì)圖像分割(二值化)過(guò)程中的3種算法進(jìn)行對(duì)比,得出效果較好的最大類間方差的算法;在邊緣檢測(cè)過(guò)程中對(duì)Sobel算法進(jìn)行改進(jìn)[2];在車道線識(shí)別的過(guò)程中應(yīng)用了霍夫變換[3],有效準(zhǔn)確地對(duì)車道線進(jìn)行識(shí)別。
1 道路圖像預(yù)處理
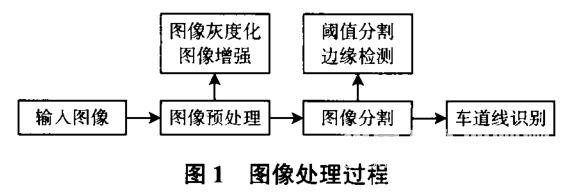
采集到的道路圖像的處理過(guò)程如圖1所示。輸入圖像后,首先對(duì)道路圖像進(jìn)行預(yù)處理,然后進(jìn)行圖像分割,最后對(duì)車道線檢測(cè)識(shí)別。
采集道路圖像時(shí),受到外界因素的影響,獲取的圖像無(wú)法完全體現(xiàn)原來(lái)圖像的所有信息,所以必須首先對(duì)道路圖像進(jìn)行預(yù)處理,達(dá)到抑制無(wú)關(guān)信息、改善圖像質(zhì)量、提取感興趣部分以及突出本文所需要的車道標(biāo)志線信息等效果。
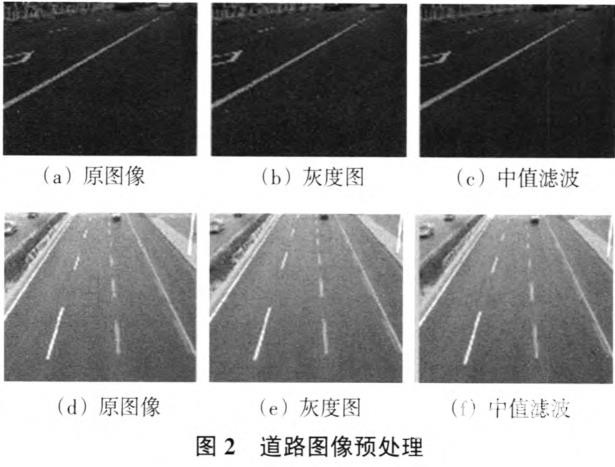
對(duì)于機(jī)器視覺(jué)(車載相機(jī))獲取的道路圖像,預(yù)處理一般分為道路圖像灰度化、道路圖像去噪以及圖像濾波增強(qiáng)等方式。本文采用加權(quán)法對(duì)圖像進(jìn)行灰度化,用中值濾波對(duì)圖像去噪,圖像預(yù)處理后的實(shí)驗(yàn)效果圖如圖2所示。
2 道路圖像閾值分割
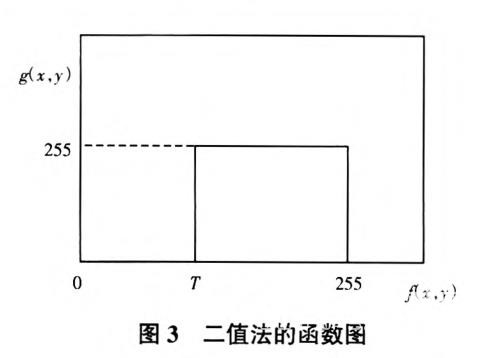
本文對(duì)道路灰度圖像主要采用閾值法分割,即將圖像二值化,選擇一個(gè)合適的閾值,將原始的圖像轉(zhuǎn)換成黑白二值圖像。灰度閾值分割法的處理函數(shù)為:

式中:f (x,y)為原始圖像中的像素值;g(x,y)為處理后的黑白圖像的像素值。灰度閾值分割法是一種非線性運(yùn)算,其函數(shù)圖如圖3所示。
本文研究灰度圖像二值化的3種自動(dòng)閾值算法。一般自動(dòng)選取閾值可以使處理后的圖像達(dá)到穩(wěn)定可靠的效果。
2.1迭代法閾值分割
迭代式閾值選擇方法的基本思想是開(kāi)始選擇一個(gè)閾值作為初始估計(jì)值,然后按照某種規(guī)則不斷地更新這一估計(jì)值,直到滿足給定的條件為止[4]。下面是一種迭代算法:
(1)選擇圖像灰度T作為初始估計(jì)值。

(5)重復(fù)步驟(2)至步驟(4),直到逐次迭代得到的T值小于先前定義的參數(shù)T值。
2.2最大類間方差法(OTSU法)
最大類間方差法[5] (又稱大率法)是一種使類間方差最大的自動(dòng)確定閾值的方法,該方法具有簡(jiǎn)單、處理速度快的特點(diǎn)[6]。其思想為設(shè)圖像中灰度值為i的像素?cái)?shù)為ni灰度范圍為[0,L-1],則總的像素?cái)?shù)為:


2.3分水嶺算法
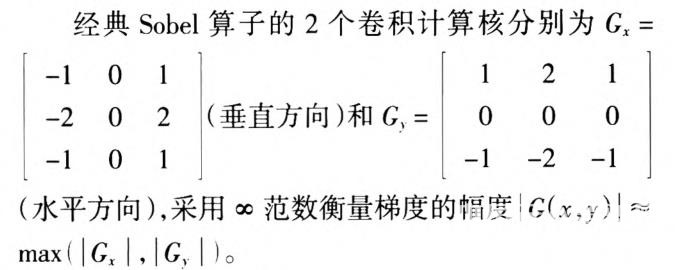
分水嶺算法是一種應(yīng)用了形態(tài)學(xué)理論的分割方法,其核心思想是將一幅圖像看成一個(gè)拓?fù)涞匦螆D,將灰度值f(x,y)定義為對(duì)應(yīng)地形高度值,其中高灰度值代表著山峰;低灰度值代表著山谷。水總是朝地勢(shì)低的地方流去,直到在局部低洼處停下來(lái),岡此稱這個(gè)低洼處為吸水盆地。全部的水分聚在不同的吸水盆地,吸水盆地之間的山脊叫作分水嶺。水從分水嶺流下來(lái),朝不同吸水盆地流去的概率是相等的。將這種思想應(yīng)用于圖像閾值分割,等于在灰度圖像中找出不同的吸水盆地和分水嶺,完成閾值分割,這種算法被稱為分水嶺算法。分水嶺算法的分割原理示意圖如圖4所示。閾值分割的3種算法性能比較效果圖如圖5所示,3種算法進(jìn)行閾值分割實(shí)驗(yàn)所用的時(shí)間如表1所示:

圖5對(duì)3種閾值分割方法進(jìn)行了比較,可以看出,迭代法閾值和最大類間方差法閾值的效果較好。從表1也可以看出最大類間方差法處理圖像速度更快,所以本文采用最大類間方差法對(duì)圖像進(jìn)行二值化,以此得到比較理想的效果。
3 道路圖像邊緣檢測(cè)
道路圖像邊緣檢測(cè)算法有Roberts算子、Log算子、Prewitt算子、Canny算子和Sobel算子。其中Sobel邊緣提取算法在圖像空間上易于實(shí)現(xiàn),可以平滑噪聲,能夠提供較為準(zhǔn)確的邊緣信息。
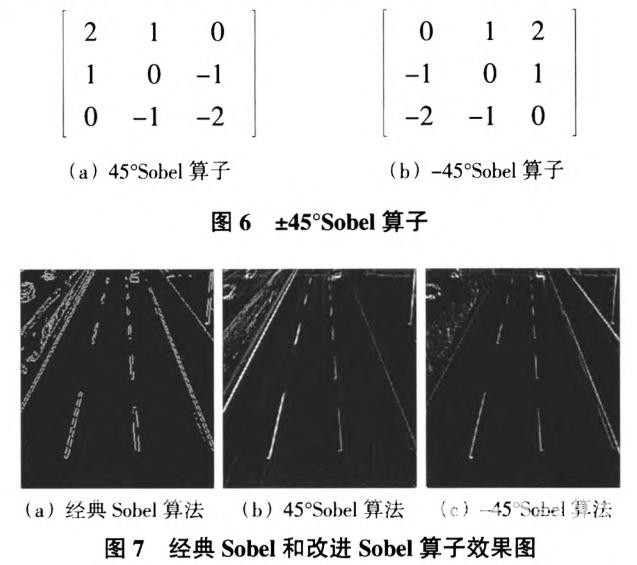
3.1經(jīng)典Sobel算子
3.2改進(jìn)的Sobel算子
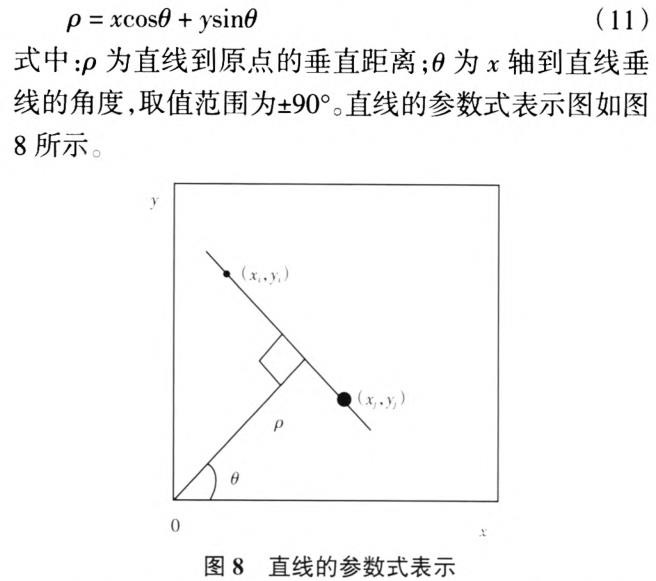
道路圖像中的車道線具有斜直線性特征,最強(qiáng)邊緣方向接近正負(fù)45度,所以本文采用改進(jìn)的算子模板來(lái)進(jìn)行邊緣提取,模板如圖6所示。經(jīng)典Sobel算法和改進(jìn)算法的實(shí)驗(yàn)效果圖如圖7所示。
比較圖7(a)、(b)和(c)可以看m,采用經(jīng)典Sobel算子可以增強(qiáng)車道線的邊緣,減少路面等干擾因素,但是車道線兩側(cè)邊緣增強(qiáng)增加了識(shí)別的難度;改進(jìn)的Sobel算法只是增強(qiáng)了車道線的內(nèi)側(cè),容易識(shí)別,也保證了精度。所以本文采用改進(jìn)的Sobel算法對(duì)車道線進(jìn)行邊緣提取。
4 基于霍夫變換的車道線識(shí)別
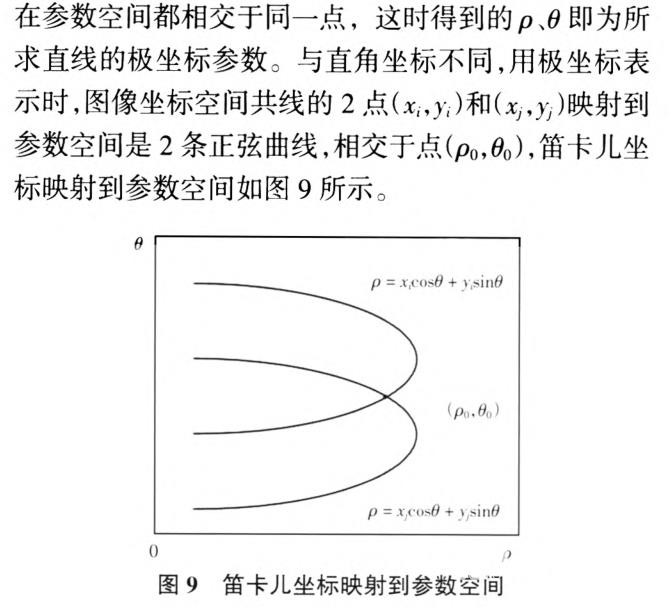
霍夫變換是一種非常重要的檢測(cè)間斷點(diǎn)邊界形狀的方法,它通過(guò)將圖像坐標(biāo)空間變換到參數(shù)空間來(lái)實(shí)現(xiàn)直線和曲線的擬合。本文主要研究結(jié)構(gòu)化道路[7]中直線車道線識(shí)別。在極坐標(biāo)中用參數(shù)方程表示一條直線
與直角坐標(biāo)類似,極坐標(biāo)中的霍夫變換也把圖像坐標(biāo)空間中的點(diǎn)變換到參數(shù)空間中。用極坐標(biāo)表示時(shí),圖像坐標(biāo)空間中共線的點(diǎn)映射到參數(shù)空間以后,在參數(shù)空間都相交于同一點(diǎn),這時(shí)得到的P、θ即為所求直線的極坐標(biāo)參數(shù)。
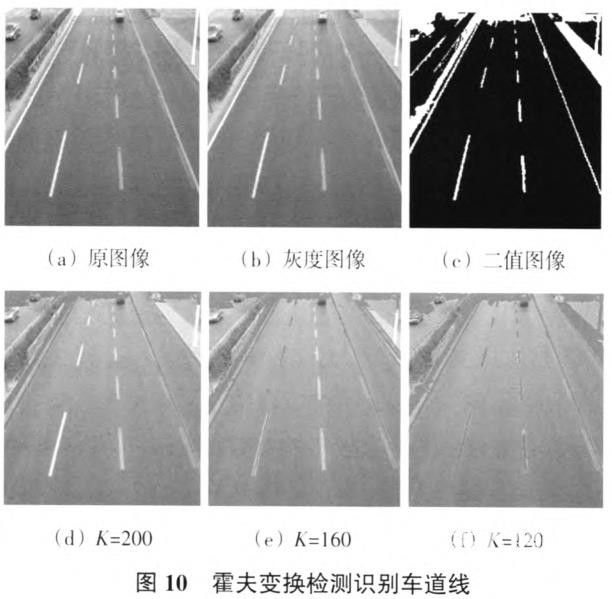
經(jīng)過(guò)霍夫變換檢測(cè)出的車道線圖像如圖10所示。設(shè)提取直線時(shí)得閾值為K,由圖10可以看出,提取直線的閾值越大,無(wú)關(guān)細(xì)節(jié)也會(huì)減少;提取直線的閾值越小,無(wú)關(guān)細(xì)節(jié)也可能增加。通過(guò)對(duì)閾值的適當(dāng)調(diào)節(jié)可使提取直線的效果更好:
5 結(jié)束語(yǔ)
本文主要針對(duì)結(jié)構(gòu)化道路對(duì)比了二值化的3種算法,最終得m效果較好的OTSU算法;在經(jīng)典Sobel算法的基礎(chǔ)上做了改進(jìn),得m了改進(jìn)的Sobel算法;采用霍夫變換的檢測(cè)方法對(duì)車道線進(jìn)行識(shí)別,取得了較為理想的效果。但是對(duì)于路面上存在嚴(yán)重干擾或者非結(jié)構(gòu)化道路的情況,這種方法的車道線識(shí)別準(zhǔn)確度還有待提高。
參考文獻(xiàn):
[1]許宏科,秦嚴(yán)嚴(yán).一種基于Hough變換的車道線檢測(cè)新方法[J].徐州丁程學(xué)院學(xué)報(bào),2013(4):1—4.
i2]侯利龍.高速公路車道線檢測(cè)算法研究[D].鄭州:河南工業(yè)大學(xué).2012.
[3]侯立龍,狄?guī)?直線模趔下的高速公路車道線檢測(cè)方法研究[J].清遠(yuǎn)職業(yè)技術(shù)學(xué)院學(xué)報(bào),201 1(6):73—76.
[4]張錚,倪紅霞,苑春苗,等.精通Matlab數(shù)字圖像處理與識(shí)別[M].北京:人民郵電}lj版社.2013.
[5] 吳一全,潘赫.2維最大類問(wèn)平均離差閾值選取快速遞推算法[J].中國(guó)圖象|j2.|彤學(xué)報(bào),2009,14(3):471—476.
[6]張德E數(shù)字罔像處理[M].北京:人民郵電出版社,2009.
[7]CHENG H Y,Y C C,TSENG C C,et al.Environmentclassification and hierarchical lane detection for structured and unstructured roads[J].IET Computer Vision,2010,4(1):37-49